شارك الأستاذ الدكتور عبدالله ضايع، التدريسي في كلية الهندسة – قسم الهندسة الميكانيكية بجامعة بغداد، في المؤتمر الدولي الثاني للتوجيهات والتطبيقات الحديثة في الذكاء الصناعي (The 2nd International Conference on Emerging Trends and Application in Artificial Intelligence)، الذي أقيم في جامعة الفراهيدي يومي 2-3 تشرين الأول 2024، بالتعاون مع جامعة ميديبول وجامعة كارابوك التركية.
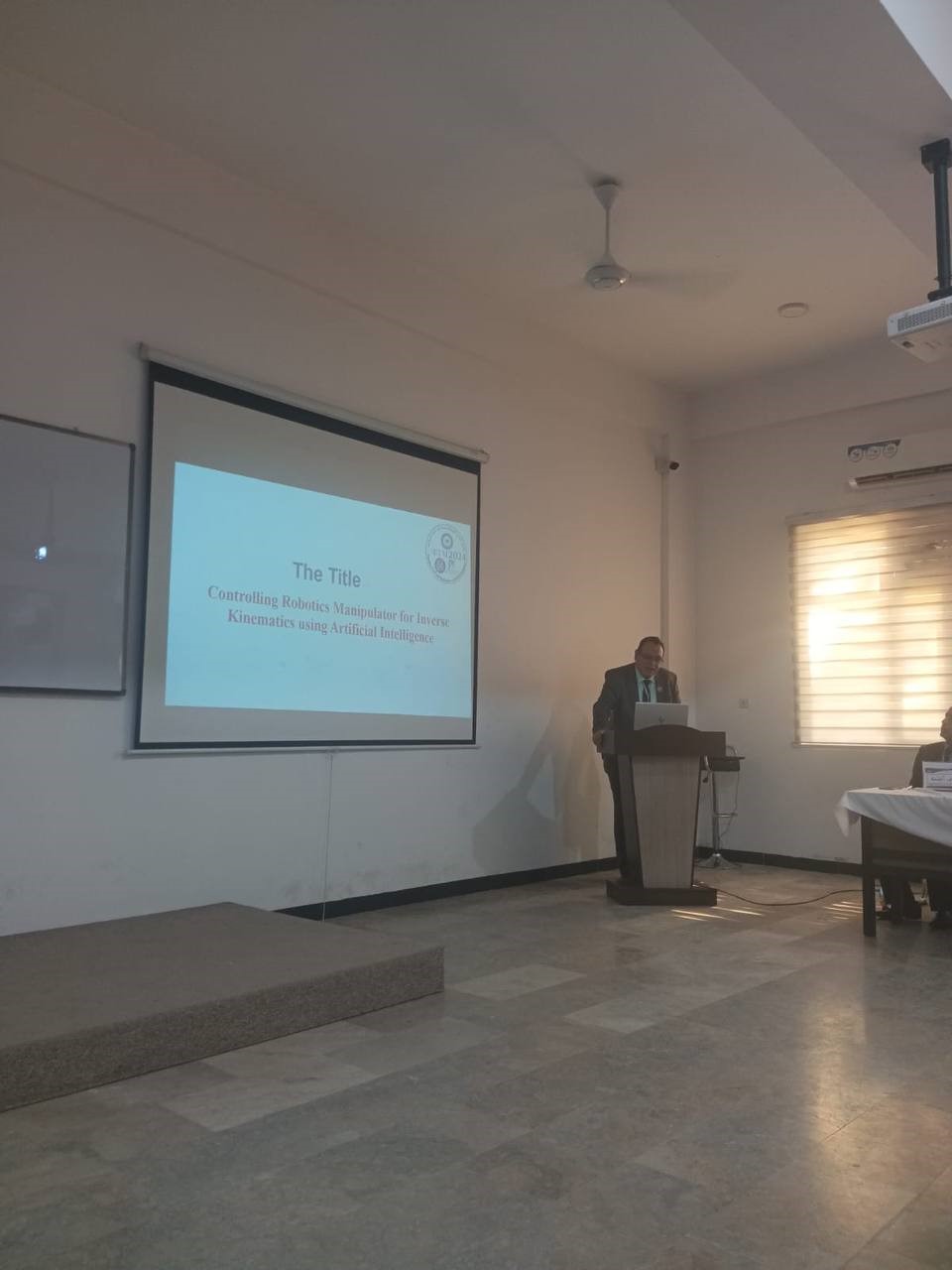
قدم الدكتور عبدالله ضايع بحثًا علميًا بعنوان “التحكم في معالج الروبوتات للحركة العكسية باستخدام الذكاء الاصطناعي”حيث تم مناقشته يوم الخميس 3 تشرين الأول 2024 في قاعة كلية الهندسة التقنية بجامعة الفراهيدي، بحضور مساعد رئيس الجامعة وعدد من الباحثين والمختصين.
يهدف البحث إلى دراسة حل الحركية العكسية للروبوتات باستخدام نظام الاستدلال العائم المتكيف عصوبياً (ANFIS) من خلال الاستفادة من زاوية التوجيه، حيث تم استخدام برنامج MATLAB لمحاكاة ذراع روبوتية ذات درجتين من الحرية. وتم إنشاء نظام ANFIS لحساب قيم الزوايا (ϴ1 و ϴ2) لأشكال مختلفة من بيانات الإدخال، ومن ثم تقييم أداء كل منها لتحديد البيانات التي تحقق أفضل النتائج.
وأظهرت نتائج البحث أن استخدام تقنية ANFIS في حل مشكلة الحركة العكسية قد حقق نتائج مرضية، مما يثبت فعالية هذه التقنية في هذا المجال كما أشار الباحث إلى أن استخدام الإحداثيات الديكارتية يحقق دقة أعلى مقارنةً بالإحداثيات القطبية. وأكد أن هذه التقنية يمكن تطبيقها على أذرع روبوتية ذات درجات حرية متعددة، مما يفتح آفاقًا لتطبيقات أوسع في مجال التحكم في الروبوتات.
وحظي البحث باهتمام الحضور، وأشادوا بجهود الباحث في تطوير حلول مبتكرة تعتمد على الذكاء الصناعي لتحسين أداء الروبوتات.